Vision-recognition Automonous Take-off/Land of Rotating-wing UAV
HomeVision-recognition Automonous Take-off/Land of Rotating-wing UAV
HomeVision-recognition Automonous Take-off/Land of Rotating-wing UAV
RESEARCH
Project Title
(Korean) 영상인지 자동이착륙 기술 연구
(English) Vision-recognition Automonous Take-off/Land of Rotating-wing UAV
Objectives
The final goal of this research is to generate guidance and control commands based on vision information for a rotary wing UAV and to verify its performance by carrying out actual flight test.
Detailed Research Subjects
본 과제는 국방과학연구소의 무인화 특화센터(Unmanned Technology Research Center)주관 하에 서울대 FDCL과 카이스트 ASCL 공동으로 연구하는 과제이다. 무인기가 운용자가 지정한 지점까지 자율적으로 비행 및 자동 이착륙을 수행하는 것이 본 과제의 목표인데, 기존의 GPS정보만을 이용한 유도법칙 만으로는 다양한 장애물과 GPS의 오차가 존재하는 실제 비행 환경에서는 자동 이착륙이 불가능하다. 따라서 본 과제의 목적을 달성하기 위해서는 영상 정보를 이용한 상대 항법이 반드시 필요한데 여기에는 single camera, stereo vision, ladar등의 영상 센서를 이용하여 자동 이착륙에 필요한 영상 항법 정보를 생성해낸다.
Optif Flow Image (Left)
Ladar Image (Center)
Stereo Vision Image (Right)
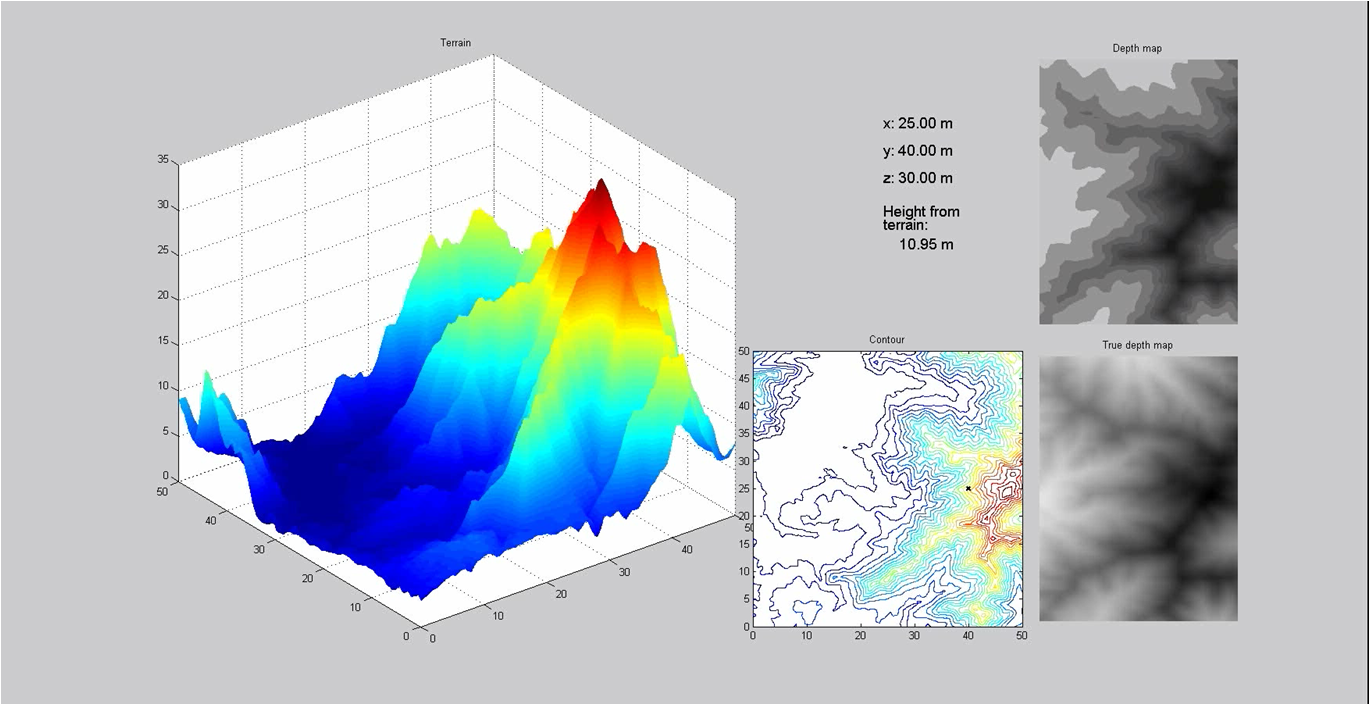
본 과제에서 서울대는 Stereo vision기법을 이용하여 장애물 회피를 통한 자동 이착륙 기술을 연구한다. Stereo vision을 이용하면 depth map을 생성하여 영상의 임의 지점까지의 상대 거리를 측정할 수 있다. 이를 통하여 장애물을 검출하고 회피 기동 및 착륙 명령을 생성해 내게 된다. 본 연구에서는 최종적으로 영상 정보를 이용한 실제 착륙 실험을 수행하게 되지만 실험을 수행하기 전까지 영상을 이용한 유도 알고리듬 연구 수행을 실제 stereo vision장비가 없이 과제를 수행하기 위하여, 이전에 시도되지 않았던 stereo vision simulator를 직접 자체 제작하였다.
Stereo Vision Simulator
본 시뮬레이터를 통해 연구 목적 달성과는 큰 관련이 없으나 실제적으로 시간과 노력이 많이 드는 stereo vision 영상 정합 과정을 가상으로 처리하여 하드웨어와 분리된 stereo vision 알고리듬만을 연구할 수 있다. 이를 통하여 회전익 무인기(쿼드로터)의 장애물 회피 시뮬레이션 및 자동 착륙지 선정 연구를 수행중에 있다.
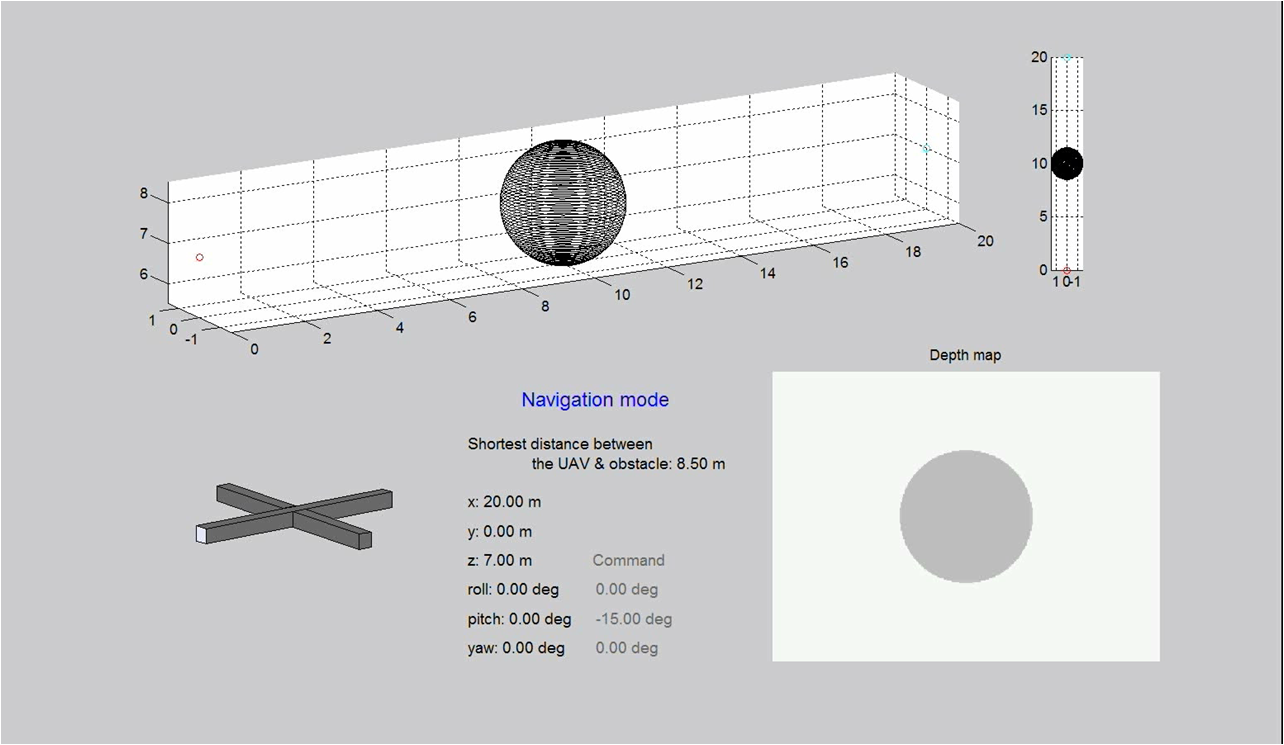
Vision-based Collision Avoidance Simulation Environment with the Stereo Vision Simulator
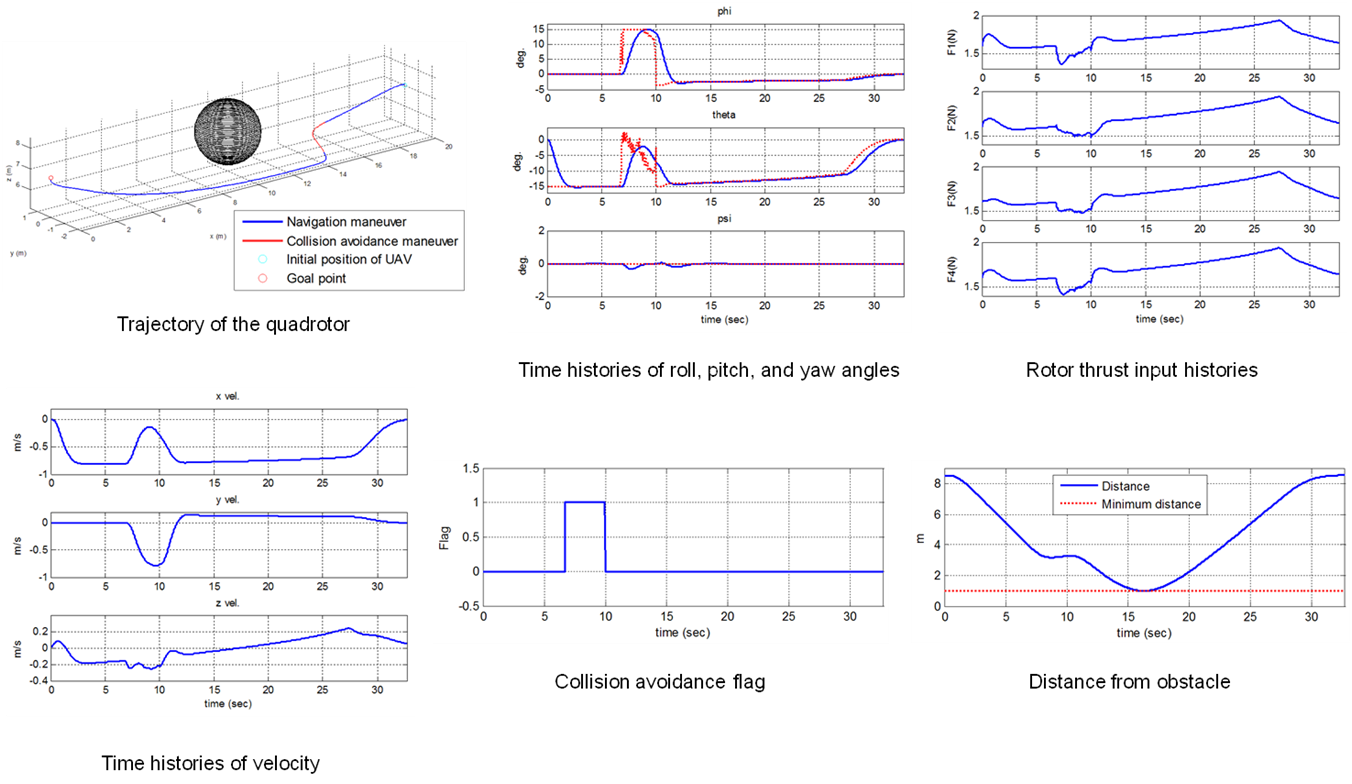
Collision Avoidance Simulation Result
최종적으로 본 과제는 stereo vision 카메라를 탑재한 회전익 무인기를 통하여 임의의 장애물이 존재하는 지형에 자동으로 착륙지를 선정하여 착륙하는 시뮬레이션 및 실제 비행 실험을 통한 알고리듬 검증을 수행할 예정이다.