Terrain Following and Cooperative Mission Control Algorithm
HomeTerrain Following and Cooperative Mission Control Algorithm
HomeTerrain Following and Cooperative Mission Control Algorithm
RESERARCH
Project Title
(Korean) 지형추종 및 협력임무수행 알고리즘 개발
(English) A Study on Terrain Following and Cooperative Mission Control Algorithm
Research Period
August 2010 – December 2012
Objectives
Terrain following is very important for UCAV because UCAV should fly close to ground to avoid being detected by enemy’s radar, which may improve the survivability of UCAV performing dangerous mission such as SEAD. In this study, particular guidance, navigation, and trajectory generation algorithms are selected which are appropriate for terrain following. To deal with GPS jamming, terrain referenced navigation based on nonlinear filter is chosen.
Summary
무인기는 정찰이나 감시 임무와 같이 지상 조종사에 의해서 원격조종될 수 있는 단순한 임무를 주로 수행해 왔다. 최근 들어 컴퓨터, 통신 및 전자장비, 기체 및 무장 성능이 발전함에 따라 무인기의 임무는 시시각각 급변하는 전장에서 유인기와의 협력적인 전투임무까지 확대되고 있다. 본 연구에서는 이와 같은 전투임무에서 필수적인 무인기의 지형추종 알고리즘, 동시 도달 경로생성 알고리즘, 분산형 협력제어 알고리즘, 그룹전략 재설정 알고리즘 등을 중심으로 연구를 수행하여, 다수의 무인전투기가 협력하여 전투임무를 수행하기 위한 핵심 알고리즘을 설계할 수 있는 기반기술을 확보하고자 한다.
본 연구에서는 동적으로 변하는 상황에 대처하고 무인기의 손실을 최소화하며 임무달성도를 높일 수 있도록, 지형추종 및 협력임무수행 알고리즘을 포함한 무인전투기의 핵심 유도조종 알고리즘 설계를 위하여 다음과 같은 연구개발 목표 및 연구개발 내용을 연차별로 설정하고 연구를 수행한다.
단계
연도
연구개발 목표
연구개발 내용
3단계
2010
연구 기반 자료 및 요구조건 분석
지형을 고려한 대공망 회피와 지면 충돌방지
무인기 유도조종 통합 알고리즘 개발
무인기 임무 요구조건 사례 조사
지형참조 항법 연구
지형고려 경로계획 및 궤적 생성
지형추종 유도제어 알고리즘 연구
알고리즘 간의 통합구조 설계 및 입출력 구조 정의
2011
지면을 고려한 대공망 회피와 지면 충돌방지
공격효율 극대화를 위한 연구
시뮬레이션 및 검증을 위한 연구
급변하는 전장상황에
대처하기 위한 연구
3차원 지형에 대한 충돌방지 및
지형추종 연구
목표점 접근 각도 및 시각을
고려한 경로생성
실시간 적용이 가능 경로계획
기법 개발
분산형 협력제어 알고리즘 설계
동적 임무할당 기법 연구
SEAD 임무 효율을 높이기 위한 기동 고려
무인전투기 SEAD 임무분석 및
표준화
시뮬레이션 모델 개발 및 평가
검증
위협도 및 편대재구성 기동의
데이터베이스화
2012
급변하는 전장상황에
대처하기 위한 연구
시뮬레이션 및 검증을 위한 연구
알고리즘의 효율적인 통합
그룹전략 재설정 알고리즘
연구 개발
시뮬레이션 모델 개발 및 평가
검증
최적화 문제 정의 및 기법
알고리즘 통합
Rellated Picture
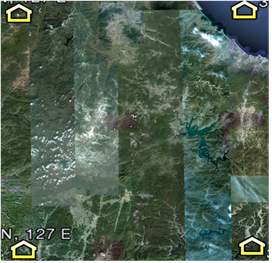
Example: Actual Map
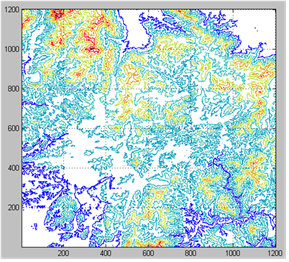
Example: DTED Map
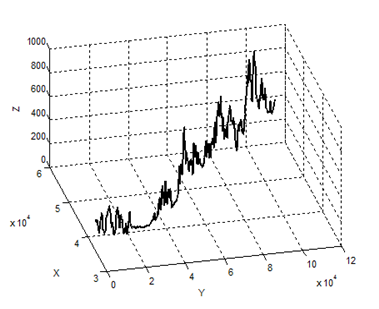
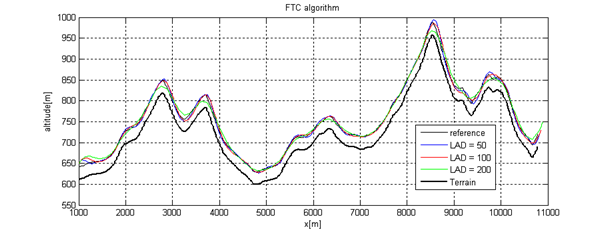
FTC Algorithm Simulation Results (Vertical)
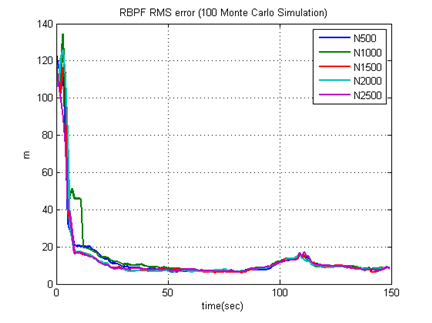
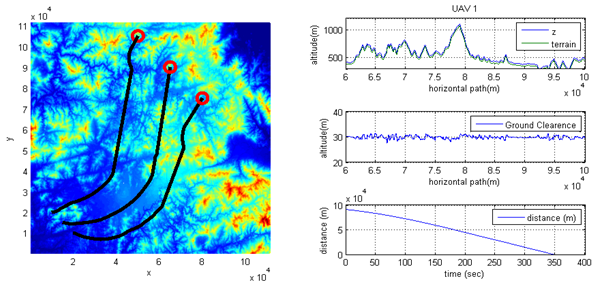
Simulation Results of 3 UAVs with Velocity of 300m/s , Safe Altitude of 30m, and Desired Arrival Time of 350sec