The study on vision-based collision avoidance aims to implement technology of the vision sensor to aircraft and develop a collision avoidance algorithm related to the guidance algorithm for aircraft.
Summary
The study consists of the implementation of technology of the vision sensor for aircraft, development of a collision avoidance algorithm related to the aircraft guidance, and demonstration of the algorithm through the PILS/HILS (Process-in-the-loop simulation/Hardware-in-the-loop simulation).
[Year 2010]
Survey on vision-based collision avoidance
Acquisition of video data related to midair collision
Research on filtering image processing
[Year 2011]
Research on vision-based collision avoidance
Development of collision detection and target tracking process
Experiment with flying test bed
[Year 2012]
Development of PILS/HILS systems
PILS/HILS experiments for performance evaluation
Performance test and improvement through flight tests
Details
1. Research on collision avoidance and guidance algorithm
Development of path planning or collision avoidance methods for environments of multiple UAVs or obstacles.
1) Potential field method 2) Guidance-based method 3) Modification of path planning 4) Vision sensor-aided approach
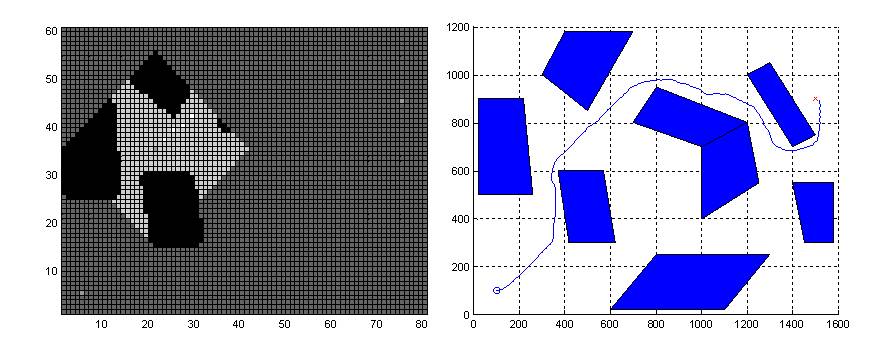
Real-time path planning using D* algorithm
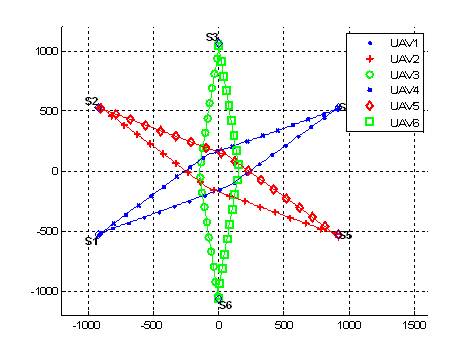
Collision avoidance for multiple UAVs
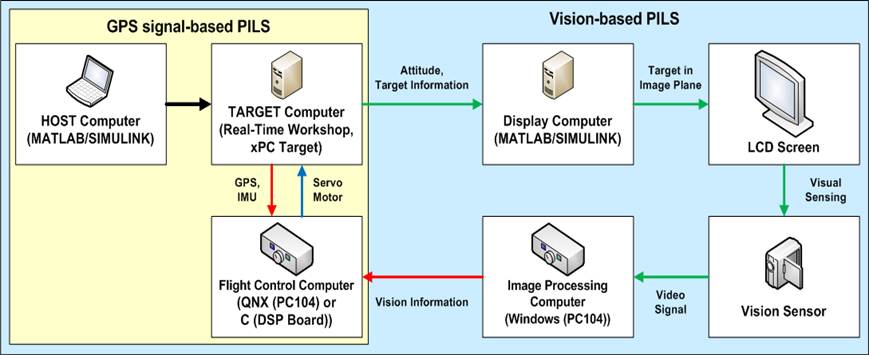
2. Performance evaluation through HILS/PILS system
– Mimicking the image of collision threats – Development of the vision-based HILS system – Performance evaluation of the vision-based collision avoidance